製作一台自走車需要需多演算法相輔相成,大致可以分成三大部分,傳感、感知、決策。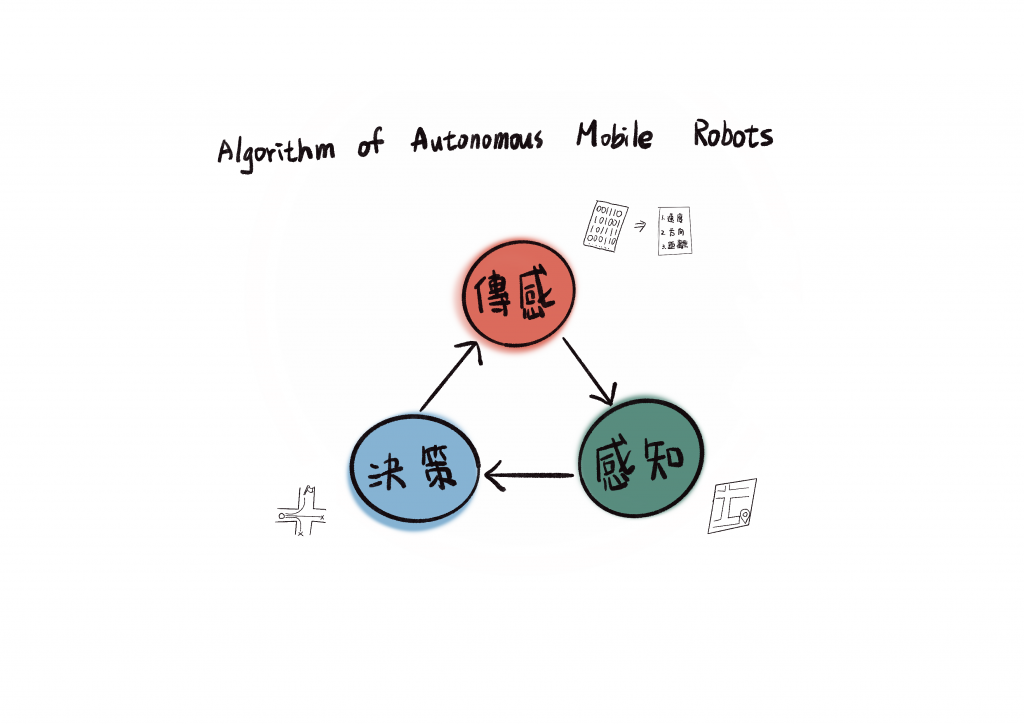
那今天來介紹傳感的部分與感測器的種類,傳感之於自走車,就像是人類的五感,我們透夠眼睛看見色彩、判斷距離,即使在全黑的狀態也能透過觸覺來前進,感測器就是自走車的五官,有許多不同的類型、各有優劣,最好的感測器就是使它們互相搭配、截長補短,這就是感測器的整合(sensor fusion),今天僅針對傳感器的種類做介紹。
GPS(全球定位系統Global Positioning System),透過衛星來提供準確的定位、測速和高精度的標準時間,範圍遍佈全地球、在任何天氣條件下24小時運作。GPS接收器可以協助自走車完成定位,算相對準確的定位用感測器,但更新頻率僅有10Hz、精度難以低於一公尺,且若是有進入建築物體內,將會大大影響精度。如汽車導航時常因為進入隧道,而產生導航失靈等等。
IMU(慣性測量單元Inertial measurement unit)包括一個三軸的陀螺儀及三的方向的加速度計,可以用來量測自走車在三維空間中的角速度和加速度,更新頻率可以達到200Hz以上,但是準確度會隨著時間的增加而降低。在大多情況下,自走車中的GPS和IMU會綁定在一起,作為導航傳感器使用,兩者的優點可以相互彌補對方的缺點。
相機作為自走車的「眼睛」提供「機器視覺」,被廣泛應用於物體識別及物體追蹤等任務,例如:車道、交通號誌、行人等等。但因為相機的拍攝品質有光源有關,較不適用於無充足光源的場景。
我目前只接觸過Intel RealSense Tracking Camera T265,不需要其他設備就可低功耗運行V‑SLAM,不過在我的研究中不是主角所以並沒有深入使用。
有興趣的人可以看看別人的介紹。
雷達(Radio Detection and Ranging)和聲納(SOund Navigation And Ranging)分別是把電磁波和聲波的能量發射至空間的某一方向,處在此方向上的物理將反射此能量,接收器會紀錄發送與收回的時間,並將此時間差轉換成距離,雷達與聲納系統所產生的資料不需要過多的處理,通常可以直接被控制器採用,因此常在自走車系統中做為緊急避障用的工具。
光達(Light Detection And Ranging)的原理和雷達相似,將近紅外光、可見光或紫外光照射物件,並透過感測器接收反射光,其接收回來的資料被轉換成點雲(point clouds)資訊。光達可以用來產生高精度地圖,並針對高精地圖完成車輛的定位以及避障需求。點雲是空間中的點集合,每個點的位置都由一組笛卡兒坐標描述(XYZ),有些可能含有色彩資訊(RGB)或物體反射面強度(Intensity)資訊。
我的研究重心將放在光達上,所以對於日後對光達的著墨會比較多,明天將會介紹一些點雲或影像處理的資料庫。


 iThome鐵人賽
iThome鐵人賽